This article outlines only one type of tube pushrod. I can't tell you
if this pushrod will be strong or rigid enough for your application but I
can tell you that this pushrod is very strong. If the length of the
finished pushrod allows it to flex then you can add supports to the
structure as needed.
Supports don't need to be anything more than hard balsa or light plywood
strips glued to the fuselage sides and reinforced if necessary. The
supports should have a hole large enough
for the pushrod to slide through without binding. Usually one or two
drill sizes larger than the pushrod works well.
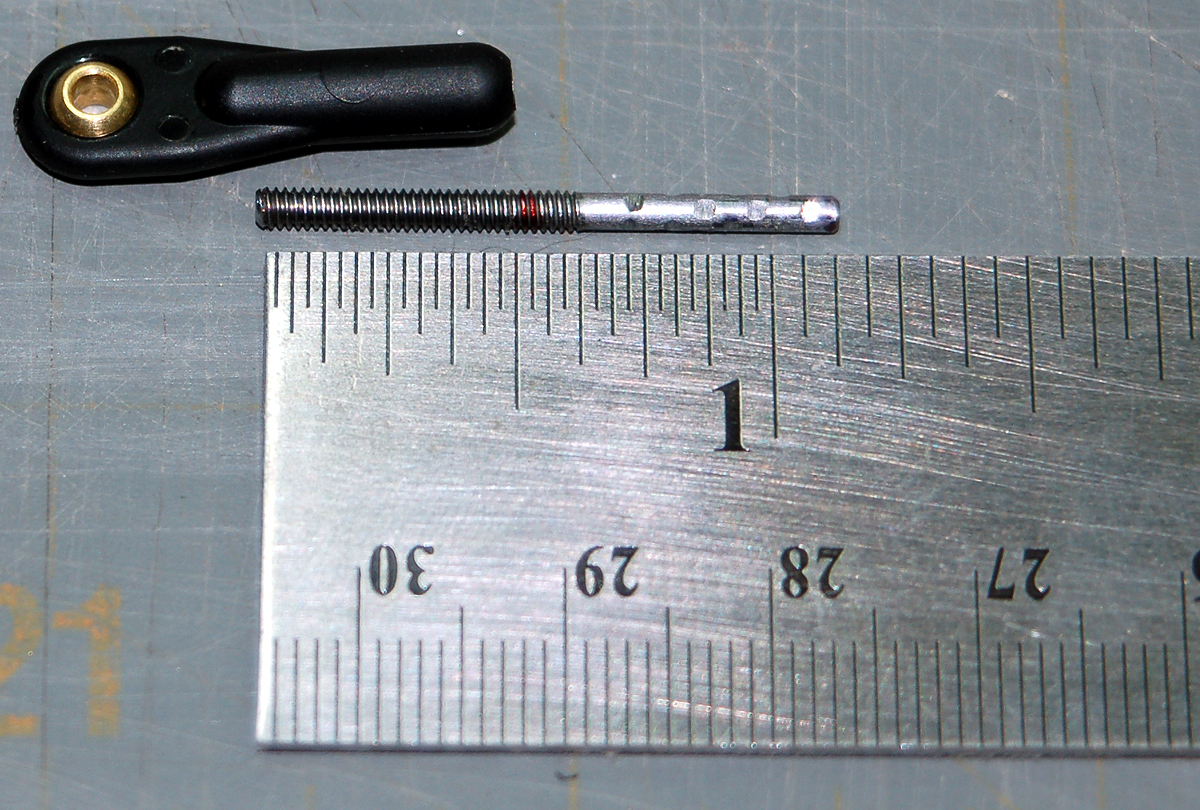
This style pushrod depends on the threaded rod being a good fit inside the
tube. Very good pushrods can be made with fiberglass or carbon fiber
tubes that are significantly larger than the threaded rod but the technique
for making those pushrods
is much different than what is demonstrated here.
While you can make these larger pushrods using
items you probably have in your shop you can also construct a pushrod using
commercially available ends that accept the threaded rod and glue into the
end of the tube. Again, those are pushrods having diameters
significantly larger than the threaded rod such as 1/4" fiberglass pushrods
with 2-56 of 4-40 threaded rod. And again, they require a different
method of construction.
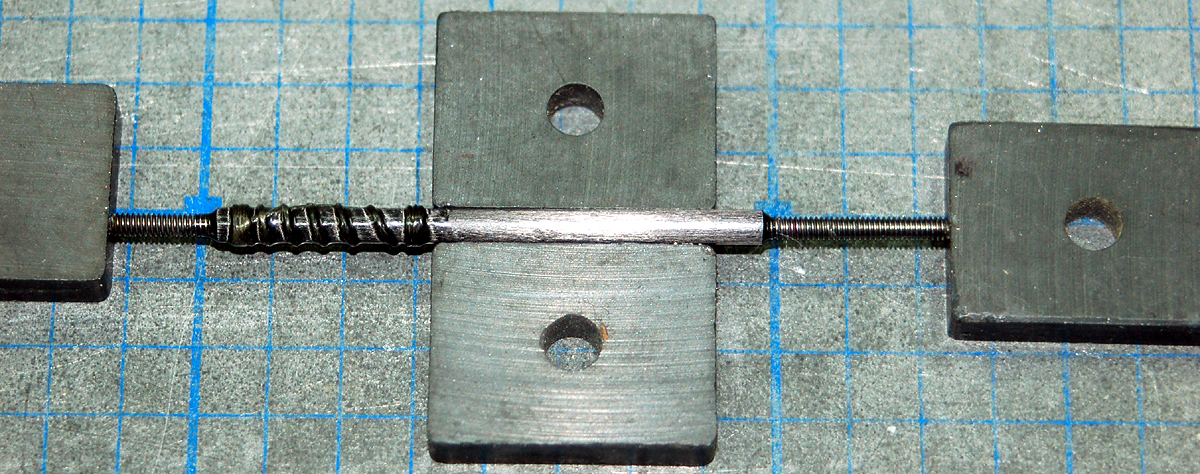
The pushrod style shown here works for any type of tube that is light, rigid and that epoxy will adhere to. Therefore
aluminum or fiberglass tube will also work. However aluminum is much
weaker and is normally a really poor choice for anything other than park
flyers where the lighter weight of thin-wall aluminum is preferable to
carbon fiber tubes that are heavier due to having thicker walls.
The servo must be securely mounted in its final location. Remove the
servo arm. Choose the arm you want to use but leave it off the servo
for now.
The control surface must be attached and centered. For example, if you
are making a elevator pushrod then the fixed stabilizer should be secured
where it will be glued if it's not glued already. Mount it accurately
even if the mount is temporary. That means lots of pins, appropriate
clamps or whatever will keep the stabilizer in place.
It is a very good idea to find a way to lock the movable control surface in
the neutral position. Having a control surface flopping around invites
incorrect and inconsistent measurements.
Turn on your transmitter. If you are using a computer radio then
it's best to choose a memory position for your new model and reset (erase)
it. That will ensure that all the trims, sub-trims, etc. are at
neutral. If you don't want to wipe the memory for that memory slot
then you will need to center the trim and the sub-trim for the channel in
the menus.
If you aren't using a computer radio then move the trim for the channel
in question to neutral.
Plug the servo into the correct channel of the receiver.
You can use a switch jack or just plug the battery directly into the
receiver to turn it on and unplug it to turn it off.
Your servo should now be centered.
If your control does not require differential movement then use a
straightedge aligned with the control horn and the approximate hole position
of the servo arm. The pushrod itself should be straight and will work
well if it's long enough to see that it's aligned. This doesn't have
to be perfect but get it as close as you can by eye.
Now put the servo arm on the servo as close as possible to 90 to the line
from the servo to the control horn.
Do not adjust anything on your transmitter to rotate the servo arm for
better alignment. For the remainder of this article you should not be
making any adjustments to electronic trims of any type. All of that
comes after the model is completed and you're adjusting everything for the
first test flight. For now we're trying to get as mechanically
centered as possible.
If the control surface does require differential movement and you know how
much the arm needs to be rotated then you will be rotating from 90, not from
parallel to the fuselage side or some other construction centerline or
whatever. Everything is adjusted from the line from servo arm to
control horn.
If you don't know how much the arm needs to be rotated for differential
movement then you just have to do the math or give it your best guess.
Any plane that needs differential isn't going to be critical because planes
that fly with precision don't have controls that need differential except
very, very tiny bits. If you're a good enough pilot flying a good
enough contest ship that needs a 1% adjustment here or there then you don't
need this article.